

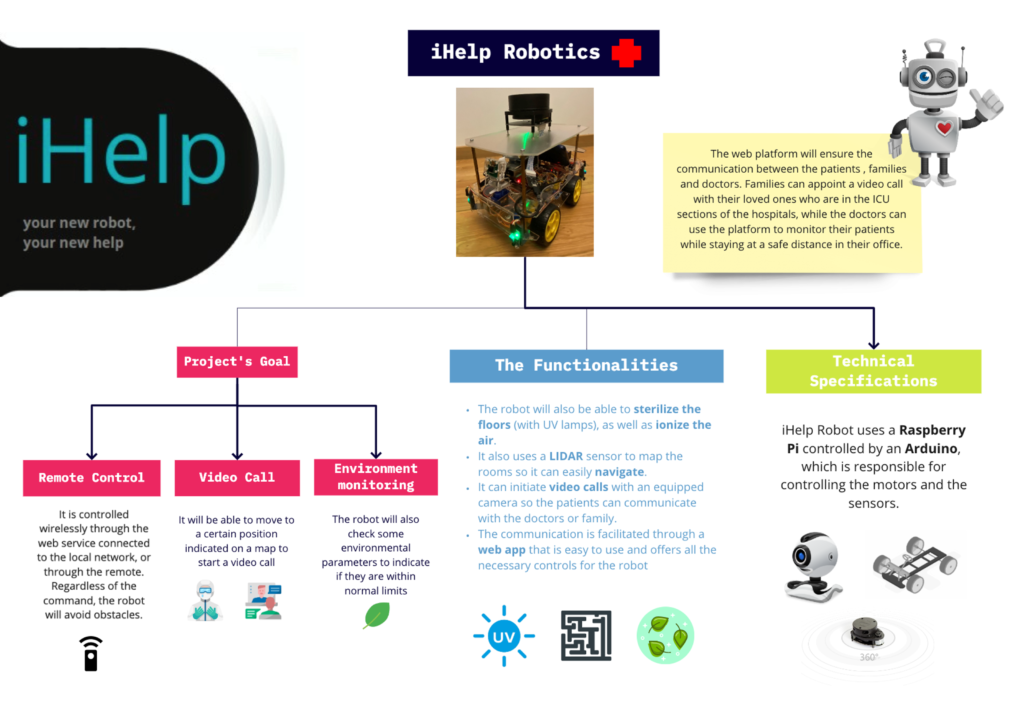
iHelp Robotics
The project aims to create a platform and robots for hospitals, through which to facilitate communication between patients, doctors and family.
Thus, doctors will have access to a mobile application, and the family will have the opportunity to schedule online for a call with patients, which is done through the robot.
I considered the following scenario:
- For a patient introduced by the hospital staff to the platform, the family will be able to make an appointment online, in the interval in which the robots are available. At the set time, the robot will move to the patient’s bed and initiate the video call, at the end it will return to the dock or will continue with the next appointment.
- Another functionality will be for the patients or the family to be able to contact the doctor through the platform.
- On the platform, internally within the hospital, a map will be available for each floor, representing, in real time, the location of doctors, robots and patients.
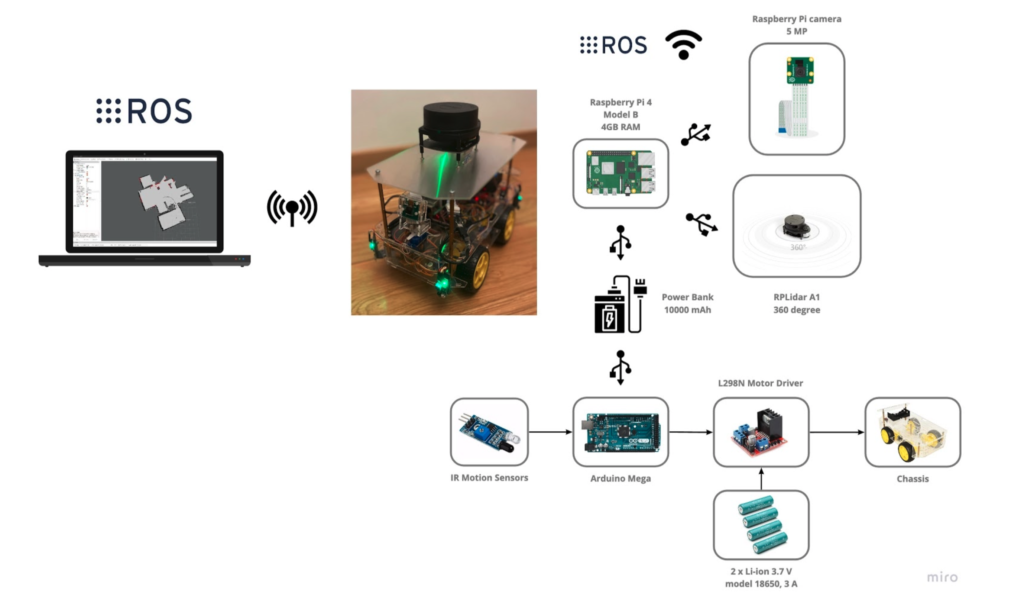
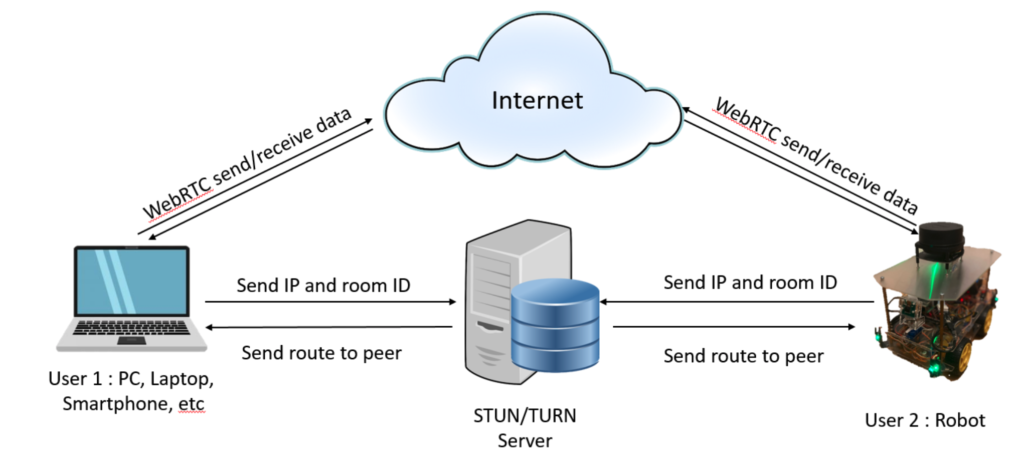
The robot moves autonomously until it encounters obstacles, then avoids them, using ultrasonic sensors HC-SR04. All this time it was transmitting video to the server.
In this stage I switched from python to ROS (Robot Operating System), the movement being made using data provided by the Lidar sensor.
All this time the robot maps the room, providing a real-time map of the room and obstacles.
The project is in progress.
Demo made during the Student Scientific Communications Session, section 12-2, May 2021, for which I won the first prize.